各競技、一番新しいものと成績のいいものを紹介します。
名前はほとんど同じものを使っているので識別がめんどくさいです。
編集途中です
■かわさきロボット
・かわさきロボット競技会
▶
・
2014 LineLive
・
2013 LineLive
・
2012 LineLive
■ライントレース
・マイクロマウス競技大会 ロボトレース競技
▶
・
2007 LineLive
・
2006 linelive
・熱田の森ロボット競技会
・lineliveEB
■ロボット相撲
・全日本ロボット相撲大会 一般の部
・
200
かわさきロボット競技会
■概要
フィールドから相手を押し出すか、ひっくり返すなどして一定時間行動不能にしたら勝ち。
特徴的な以下の様なルールがある。
・相手にアプローチするためのアームにリンク機構を組み込むこと
・移動に車輪を使ってはいけないこと
自作回路や制御がほぼ不要ということや、勝つための要素として機械体の性能が大きく影響することから、機械屋さんのオアシス。
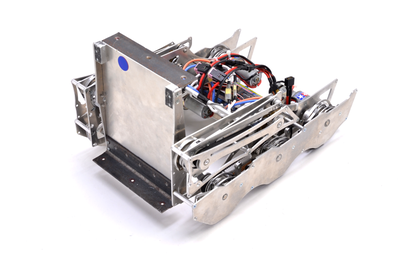
■Ver 2014
■Ver 2013

■Ver 2012

2013より脚にはヘッケンリンクを使用。
参考資料は
こちら。

アームは回転アームを使用。
最外周につけたおもりを使用してエネルギーを貯めこみ、ぶつけることで相手を弾く。
回転アームのモーターは4連装。ギア比は8:1。
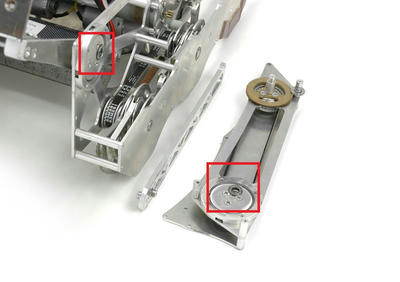
2013年より、ルール上アームにリンク機構を組み込むことが必要になったので、この機体にはスライダーリンクを取り入れた。
わずかに軸のずれているシャフトで入力(画像右側のベアリング)と出力(画像左側のベアリング)を繋いだ。
動作自体は問題なかったが、連結用のシャフトの径が足りなかったのか使っているうちに破損した。
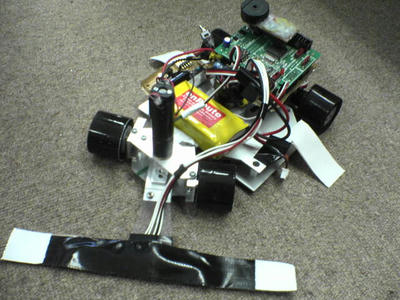
マイクロマウス競技大会 ロボトレース競技
■概要
黒面に引かれた白線コース上を走り、完走タイムを競う大会。
参加に際し回路・プログラムが重視される大会だが、最高速度は車体の性能に依存するので結局全部やることになる。
参加していた時期は吸引装置の開発に夢中になっていたが、他のレース競技よろしく無事禁止された。
Ver2007

Ver2006
全日本ロボット相撲大会 (一般の部)
◼概要
相手を土俵から押し出したら勝ち、試合運びによっては警告や優勢、反則等の判断により試合が決まることもある。
基本的な戦法はあいての下に潜り込んで押し出す。
土俵に磁石などで吸着して動くため、とんでもないスピードで動くロボットが多数いる。
制御は比較的単調だが、大電流に耐えられるモータードライバが必要になるので、回路製作の技術が必要になる。
ほか、通常のロボコンでは必要にならないような、先端のブレードに関する刃物系の知識も必要になる。

PR